الملخص
يركز هذا المشروع على تصميم نظام تحكم تلقائي في المياه يقوم بتشغيل المياه عندما تقترب اليد من الصنبور ويقوم بإيقافها عندما تبتعد اليد. يستخدم النظام مستشعرًا فوق صوتي للكشف عن قرب اليد. الهدف الرئيسي من هذا المشروع هو تعليم أساسيات الإلكترونيات والروبوتات من خلال التعلم العملي. باستخدام Arduino، ومضخة 5 فولت، ومرحّل 5 فولت، وبطارية، وأسلاك توصيل، يوفر هذا النظام وسيلة سهلة لفهم الأتمتة في المهام اليومية مثل غسل اليدين.
المقدمة
أصبحت الأتمتة جزءًا أساسيًا من الحياة اليومية، بدءًا من المهام المنزلية البسيطة وصولاً إلى العمليات الصناعية المعقدة. إحدى التطبيقات الشائعة هي التحكم التلقائي في تدفق المياه، مما يمكن أن يحسن الكفاءة والنظافة. يهدف هذا المشروع إلى تصميم نظام تحكم تلقائي في المياه باستخدام Arduino. يقوم النظام بالكشف عن اقتراب اليد من الصنبور ويقوم تلقائيًا بالتحكم في تدفق المياه، مما يوفر وسيلة مريحة وفعالة لاستخدام المياه دون تدخل يدوي.
يهدف هذا المشروع إلى أن يكون أداة تعليمية لتعريف الأطفال والكبار بأساسيات الروبوتات والإلكترونيات. من خلال بناء هذا النظام، سيكتسب المتعلمون خبرة عملية مع المستشعرات والمرحّلات ووحدات التحكم الدقيقة، مما يجعله مشروعًا مثاليًا لتطوير المهارات التي يمكن تطبيقها في دراسات أكثر تقدمًا، خاصة في مجالات الهندسة والتكنولوجيا.
المواد والأدوات:
- Arduino: وحدة التحكم الرئيسية المستخدمة لإدارة النظام.
- المستشعر فوق الصوتي: يقيس المسافة بين اليد والصنبور.
- مضخة 5 فولت: تُستخدم للتحكم في تدفق المياه.
- مرحّل 5 فولت: يعمل كقاطع لتشغيل وإيقاف المضخة.
- بطارية: توفر الطاقة للنظام.
- أسلاك توصيل: تربط جميع المكونات معًا.
- الصنبور والمياه: النظام الفعلي الذي يتم فيه التحكم في تدفق المياه.
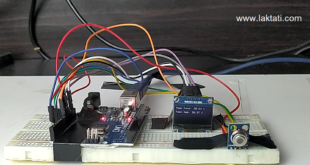
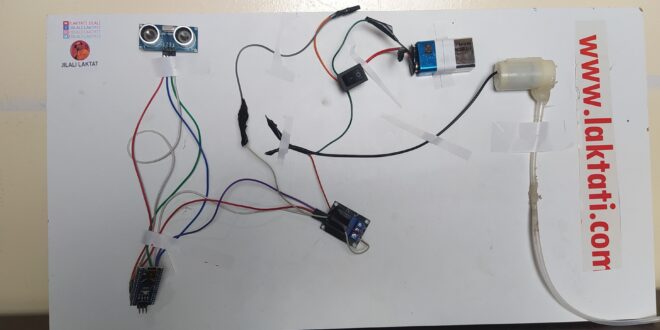
تمثيل مخطط الدائرة:
- الطرف 6: متصل بالمرحّل الذي يتحكم في مضخة 5 فولت.
- الطرف 7: متصل بالطرف Trigger للمستشعر فوق الصوتي.
- الطرف 4: متصل بالطرف Echo للمستشعر فوق الصوتي.
- البطارية: متصلة بالـ Arduino والمرحّل لتزويد النظام بالطاقة.
- المضخة: متصلة بالمرحّل الذي يتحكم في تشغيلها بناءً على إشارات Arduino.
البرمجة
int pump = 6;
const int trigPin = 7;
const int echoPin = 4;
float duration, distance;
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(pump, OUTPUT);
digitalWrite(pump, HIGH);
pinMode(echoPin, INPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration * 0.0343) / 2;
Serial.print("المسافة: ");
Serial.println(distance);
delay(500);
if (distance < 8) {
digitalWrite(pump, HIGH);
delay(500);
} else {
digitalWrite(pump, LOW);
}
}الخاتمة:
في الختام، يوضح هذا المشروع بنجاح نظام التحكم التلقائي في المياه الذي يحقق أهدافه من خلال الاستجابة بفعالية ودقة لقرب اليد من الصنبور. يعد هذا النظام مثالاً جيدًا على كيفية تبسيط التكنولوجيا للمهام اليومية وتوفير الوقت والجهد. بالإضافة إلى ذلك، يقدم المشروع فرصة تعليمية فريدة لتعلم أساسيات الإلكترونيات والبرمجة.
يثير المشروع الاهتمام بالتكنولوجيا ويوفر أساسًا متينًا لمشاريع مستقبلية في مجال الروبوتات والإلكترونيات. ومع التحسينات المستقبلية، يمكن توسيع نطاق تطبيقات هذا النظام لتشمل استخدامات أكثر عملية وتعليمية.