Résumé
Ce projet présente la conception et la mise en œuvre d’un système de barrière automatique pour véhicules en utilisant un Arduino Nano, un capteur ultrasonique, et un servo-moteur. Le capteur détecte la proximité d’un véhicule, déclenchant automatiquement le soulèvement de la barrière grâce au servo-moteur lorsque la distance mesurée est inférieure à 10 cm. Après un délai de 5 secondes, la barrière se referme automatiquement. Ce système offre une solution pratique et économique pour l’automatisation du contrôle des barrières dans les infrastructures.
- Introduction
L’automatisation des systèmes de contrôle d’accès est devenue une nécessité dans de nombreuses infrastructures, qu’il s’agisse de parkings, de zones sécurisées, ou de voies de circulation. L’idée de contrôler automatiquement l’accès des véhicules à l’aide de barrières automatiques est un concept qui a prouvé son efficacité pour réduire les coûts liés aux systèmes manuels tout en améliorant l’efficacité et la sécurité.
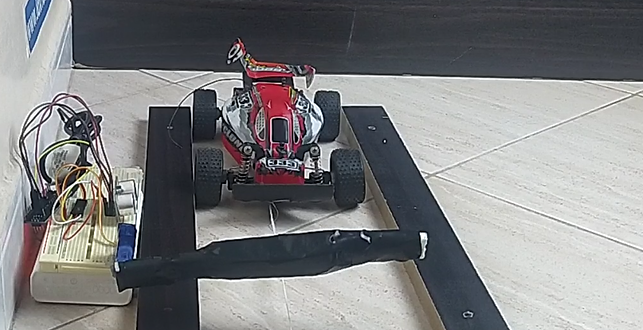
Dans ce projet, un système de barrière automatique est conçu à l’aide d’un Arduino Nano, qui sert de cerveau central pour gérer les capteurs et les actionneurs. Le capteur ultrasonique mesure la distance entre la barrière et le véhicule, et si celui-ci se trouve à une distance inférieure à 10 cm, la barrière se soulève automatiquement. Le servo-moteur est utilisé pour effectuer le mouvement vertical de la barrière, en se levant et en se fermant dans un intervalle de temps prédéfini. Ce système a été testé avec une véritable voiture, déplacée manuellement à des fins de validation.
La gestion des barrières pour véhicules est une technologie clé dans l’automatisation des infrastructures modernes, en particulier dans les zones urbaines densément peuplées, où le contrôle des flux de véhicules est crucial. De plus, l’Arduino, avec son coût abordable et sa flexibilité, constitue une solution idéale pour de nombreux projets d’automatisation. Ce projet vise à offrir une solution simple, efficace et adaptable à diverses situations, où une interaction rapide et sans intervention humaine est nécessaire.
- Matériel et Méthodes
Pour la réalisation de ce projet, les composants suivants ont été utilisés :
– Arduino Nano : Ce microcontrôleur sert à gérer toutes les opérations du système, du contrôle du capteur ultrasonique à la gestion du servo-moteur. Il est facile à programmer et suffisamment compact pour être utilisé dans des projets embarqués.
– Capteur ultrasonique (HC-SR04) : Ce capteur permet de mesurer la distance entre la barrière et le véhicule. Il envoie une impulsion sonore et calcule le temps que met cette impulsion à revenir après avoir été réfléchie par un objet (le véhicule dans ce cas).
– Servo-moteur : Le servo-moteur est chargé de soulever et d’abaisser la barrière. Il est contrôlé par des impulsions PWM envoyées par l’Arduino. La barrière se soulève à un angle de 90° lorsque le véhicule est détecté et se referme automatiquement après 5 secondes.
– Système de barrière : La barrière utilisée pour ce projet est un modèle simple, relié au servo-moteur pour effectuer les mouvements verticaux.
Le montage est simple : le capteur ultrasonique est monté près de la barrière pour détecter l’arrivée d’un véhicule. Lorsque le véhicule s’approche à une distance inférieure à 10 cm, le capteur envoie l’information à l’Arduino qui, à son tour, actionne le servo-moteur pour lever la barrière. Après un délai de 5 secondes, le servo-moteur referme la barrière. Ce système a été testé avec une voiture déplacée manuellement pour simuler l’approche d’un véhicule réel.
- Schéma de montage
Le schéma de montage est composé des éléments suivants :
– L’Arduino Nano connecté au capteur ultrasonique via les pins trig et echo.
– Le servo-moteur est contrôlé via un pin PWM de l’Arduino pour réaliser le mouvement vertical de la barrière.
- Code Arduino
Le code développé pour ce projet utilise les fonctionnalités de mesure de distance du capteur ultrasonique ainsi que le contrôle du servo-moteur. Voici un extrait clé du code :
#include <Servo.h>
const int trigPin = 7;
const int echoPin = 8;
const int servoPin = 9;
Servo barrierServo;
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
barrierServo.attach(servoPin);
barrierServo.write(0); // Barre fermée
}
void loop() {
long duration, distance;
// Envoyer un signal ultrasonique
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Lire la durée de l’écho
duration = pulseIn(echoPin, HIGH);
distance = duration * 0.034 / 2; // Calculer la distance en cm
if (distance < 10) {
// Si la distance est inférieure à 10 cm, lever la barrière
barrierServo.write(90); // Lever la barrière
delay(5000); // Attendre 5 secondes
barrierServo.write(0); // Abaisser la barrière
}
delay(100);
}
“`
Ce code permet de détecter l’approche du véhicule et d’actionner la barrière en conséquence. La barrière se soulève dès que le véhicule est détecté à moins de 10 cm et se referme après un délai de 5 secondes.
- Résultats
Lors des tests effectués avec une véritable voiture, le système s’est montré fiable pour détecter la présence d’un véhicule à proximité de la barrière et actionner le servo-moteur pour soulever celle-ci. La barrière se soulevait à un angle de 90° lorsque le véhicule atteignait une distance de moins de 10 cm, et après 5 secondes, elle se refermait automatiquement.
Le système a été testé dans différentes conditions et a prouvé son efficacité à plusieurs reprises. Aucun problème majeur n’a été observé lors de ces tests, et le capteur ultrasonique a montré une grande précision pour mesurer la distance du véhicule.
- Discussion
Ce projet a permis de démontrer l’efficacité d’un système automatisé de contrôle de barrière pour véhicules basé sur un Arduino Nano et un capteur ultrasonique. L’utilisation d’un servo-moteur a rendu possible la mise en œuvre d’un mouvement de levage fluide et précis pour la barrière. En outre, le capteur ultrasonique s’est révélé fiable pour la détection de la distance du véhicule, assurant ainsi une ouverture automatique précise de la barrière.
Ce système peut être utilisé dans des parkings, des installations de sécurité ou des zones de contrôle d’accès où la gestion automatisée de la circulation des véhicules est nécessaire. Bien qu’il soit simple à mettre en œuvre, des améliorations sont possibles, notamment l’ajout d’un second capteur pour détecter la présence continue du véhicule ou l’intégration de systèmes de communication pour un contrôle à distance.
- Conclusion
Ce projet a démontré qu’il est possible de créer un système de barrière automatique pour véhicules en utilisant des composants simples et abordables tels que l’Arduino Nano, le capteur ultrasonique et un servo-moteur. Le système s’est montré efficace lors des tests et peut être facilement adapté pour des applications réelles, qu’il s’agisse de parkings ou de systèmes de contrôle d’accès. Des améliorations futures pourraient inclure l’intégration de capteurs supplémentaires ou de mécanismes de sécurité pour améliorer la robustesse du système.