الملخص
يقدم هذا المشروع تصميم وتنفيذ نظام حاجز آلي للمركبات باستخدام أردوينو نانو ومستشعر فوق صوتي وسيرفو موتور. يقوم المستشعر باكتشاف قرب المركبة، مما يؤدي تلقائيًا إلى رفع الحاجز عندما تكون المسافة المقاسة أقل من 10 سم. بعد تأخير مدته 5 ثوانٍ، يغلق الحاجز تلقائيًا. يوفر هذا النظام حلاً عمليًا واقتصاديًا لأتمتة حاجز التحكم في الوصول في البنى التحتية.
المقدمة
أصبحت أتمتة أنظمة التحكم في الوصول ضرورة في العديد من البنى التحتية، سواء كانت لمواقف السيارات أو المناطق الآمنة أو المسارات المرورية. تُعتبر فكرة التحكم الآلي في وصول المركبات عبر الحواجز الآلية مفهومًا أثبت فعاليته في تقليل تكاليف الأنظمة اليدوية مع تحسين الكفاءة والسلامة.
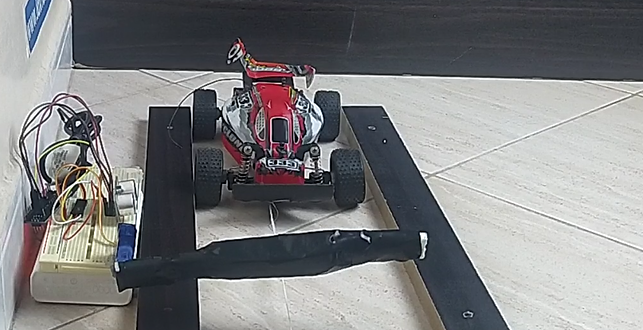
في هذا المشروع، تم تصميم نظام حاجز آلي باستخدام أردوينو نانو الذي يعمل كدماغ مركزي لإدارة المستشعرات والمشغلات. يقوم المستشعر فوق الصوتي بقياس المسافة بين الحاجز والمركبة، وإذا كانت المركبة ضمن 10 سم، يتم رفع الحاجز تلقائيًا. يتم استخدام سيرفو موتور لتنفيذ الحركة العمودية للحاجز، حيث يتم رفعه وإغلاقه ضمن فترة زمنية محددة. تم اختبار هذا النظام باستخدام سيارة حقيقية تحركت يدويًا لمحاكاة اقتراب المركبة.
إدارة حواجز المركبات تُعد تقنية رئيسية في أتمتة البنى التحتية الحديثة، خاصة في المناطق الحضرية ذات الكثافة السكانية العالية، حيث يكون التحكم في تدفق المركبات أمرًا بالغ الأهمية. علاوة على ذلك، يعد أردوينو، مع تكلفته المنخفضة ومرونته، حلاً مثاليًا للعديد من مشاريع الأتمتة. يهدف هذا المشروع إلى توفير حل بسيط وفعال وقابل للتكيف مع سيناريوهات متعددة تتطلب تفاعلًا سريعًا دون تدخل بشري.
المواد والطُرق
لتحقيق هذا المشروع، تم استخدام المكونات التالية:
- أردوينو نانو: هذا المتحكم الدقيق يدير جميع عمليات النظام، من التحكم في المستشعر فوق الصوتي إلى إدارة سيرفو موتور. يتميز بسهولة البرمجة وصغر الحجم مما يجعله مناسبًا للمشاريع المدمجة.
- مستشعر فوق صوتي (HC-SR04): يقوم هذا المستشعر بقياس المسافة بين الحاجز والمركبة. يُرسل نبضة صوتية ويحسب الوقت الذي تستغرقه النبضة للعودة بعد أن تنعكس من الجسم (في هذه الحالة، المركبة).
- سيرفو موتور: يتولى السيرفو موتور مسؤولية رفع وخفض الحاجز. يتم التحكم فيه عبر نبضات PWM التي يرسلها الأردوينو. يرتفع الحاجز بزاوية 90° عندما يتم اكتشاف المركبة ويغلق تلقائيًا بعد 5 ثوانٍ.
- نظام الحاجز: الحاجز المستخدم في هذا المشروع هو نموذج بسيط، متصل بالسيرفو موتور لتنفيذ الحركات العمودية.
التركيب بسيط: يتم تركيب المستشعر فوق الصوتي بالقرب من الحاجز لاكتشاف اقتراب المركبة. عندما تقترب المركبة لمسافة 10 سم، يرسل المستشعر المعلومات إلى الأردوينو الذي بدوره يُفعِّل السيرفو موتور لرفع الحاجز. بعد تأخير مدته 5 ثوانٍ، يقوم السيرفو موتور بخفض الحاجز. تم اختبار هذا النظام باستخدام سيارة تحركت يدويًا لمحاكاة اقتراب مركبة حقيقية.
مخطط الدائرة
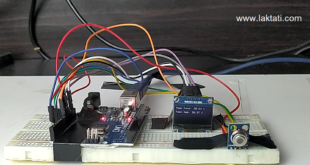
يتكون مخطط الدائرة من العناصر التالية:
- أردوينو نانو متصل بالمستشعر فوق الصوتي عبر دبابيس trig وecho.
- يتم التحكم في السيرفو موتور عبر دبوس PWM من الأردوينو لتنفيذ الحركة العمودية للحاجز.
كود الأردوينو
الكود المُطوَّر لهذا المشروع يستخدم ميزات قياس المسافة للمستشعر فوق الصوتي وكذلك التحكم في السيرفو موتور. إليك مقتطفًا رئيسيًا من الكود:
#include <Servo.h>
const int trigPin = 7;
const int echoPin = 8;
const int servoPin = 9;
Servo barrierServo;
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
barrierServo.attach(servoPin);
barrierServo.write(0); // الحاجز مغلق
}
void loop() {
long duration, distance;
// إرسال إشارة فوق صوتية
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// قراءة مدة صدى الإشارة
duration = pulseIn(echoPin, HIGH);
distance = duration * 0.034 / 2; // حساب المسافة بالسنتيمترات
if (distance < 10) {
// إذا كانت المسافة أقل من 10 سم، رفع الحاجز
barrierServo.write(90); // رفع الحاجز
delay(5000); // الانتظار لمدة 5 ثوانٍ
barrierServo.write(0); // خفض الحاجز
}
delay(100);
}يسمح هذا الكود باكتشاف اقتراب المركبة وتشغيل الحاجز وفقًا لذلك. يتم رفع الحاجز عندما تكون المركبة على مسافة أقل من 10 سم ويغلق بعد تأخير مدته 5 ثوانٍ.
النتائج
خلال الاختبارات التي أُجريت باستخدام سيارة حقيقية، أظهر النظام موثوقية في اكتشاف وجود المركبة بالقرب من الحاجز وتفعيل السيرفو موتور لرفع الحاجز. كان الحاجز يرتفع بزاوية 90° عندما تصل المركبة إلى مسافة أقل من 10 سم، وبعد 5 ثوانٍ، يغلق تلقائيًا.
تم اختبار النظام في ظروف مختلفة وأثبت فعاليته باستمرار. لم يتم ملاحظة أي مشاكل كبيرة خلال هذه الاختبارات، وأظهر المستشعر فوق الصوتي دقة عالية في قياس المسافة للمركبة.
المناقشة
أثبت هذا المشروع نجاحه في تنفيذ نظام تحكم آلي لحاجز المركبات باستخدام أردوينو نانو ومستشعر فوق صوتي. أتاح استخدام السيرفو موتور إمكانية رفع وخفض الحاجز بسلاسة ودقة. علاوة على ذلك، أثبت المستشعر فوق الصوتي موثوقيته في اكتشاف المسافة للمركبة، مما ضمن فتح الحاجز تلقائيًا بدقة.
يمكن استخدام هذا النظام في مواقف السيارات والمنشآت الأمنية أو المناطق التي تتطلب التحكم الآلي في تدفق المركبات. على الرغم من بساطة التنفيذ، إلا أن التحسينات الممكنة تشمل إضافة مستشعر ثانٍ لاكتشاف وجود المركبة بشكل مستمر أو دمج أنظمة اتصال للتحكم عن بُعد.
الخاتمة
أثبت هذا المشروع إمكانية إنشاء نظام حاجز آلي للمركبات باستخدام مكونات بسيطة ومنخفضة التكلفة مثل أردوينو نانو والمستشعر فوق الصوتي والسيرفو موتور. أثبت النظام فعاليته خلال الاختبارات ويمكن تكييفه بسهولة للتطبيقات الواقعية، مثل مواقف السيارات أو أنظمة التحكم في الوصول. يمكن أن تشمل التحسينات المستقبلية دمج مستشعرات إضافية أو آليات أمان لتعزيز متانة النظام.